SSSC Software
SSSC Software Roadmap
The SSSC has identified crucial software products and tools that will be required for LSST Solar System science but will not be provided by the LSST project. These will have to be developed by the SSSC and the broader planetary community. Our software roadmap , published in the Research Notes of the American Astronomical Society, presents this list of LSST community software development tasks.
SSSC Software Development
The SSSC Community software/infrastructure development working group has monthly meetings to discuss progress on community software tool development
Rubin LSST Solar System Predictions Focus Issue in AAS Journals
The Vera C. Rubin Observatory Legacy Survey of Space and Time (LSST) will usher in a new era of solar system science. The survey is expected to discover and monitor ~5 million solar System objects over the next decade. New algorithms and software tools are required to mine this unprecedented dataset. This focus issue is dedicated to collecting and highlighting the software tools developed by the planetary astronomy community to enable and maximize early solar system science with the LSST and Rubin Observatory.
The Rubin Observatory Solar System Processing
The Rubin Observatory's Solar System Processing (SSP) pipelines will be the main software to identify moving Solar System objects (out to distances of ~200-300 au) in LSST data. SSP is a deliverable from Rubin Observatory's data management team. This effort is being led by the Rubin Observatory's Solar System Processing Team based at the University of Washington. A brief overview of how the Solar System Processing (SSP) will work is described below. For a more detailed overview of SSP and the current state of its development, check on the Rubin Observatory's SSP Development Page. You can learn more about the specific Solar System data products that SSP and the Rubin Observatory's LSST will generate on the SSSC's Data Products Page.
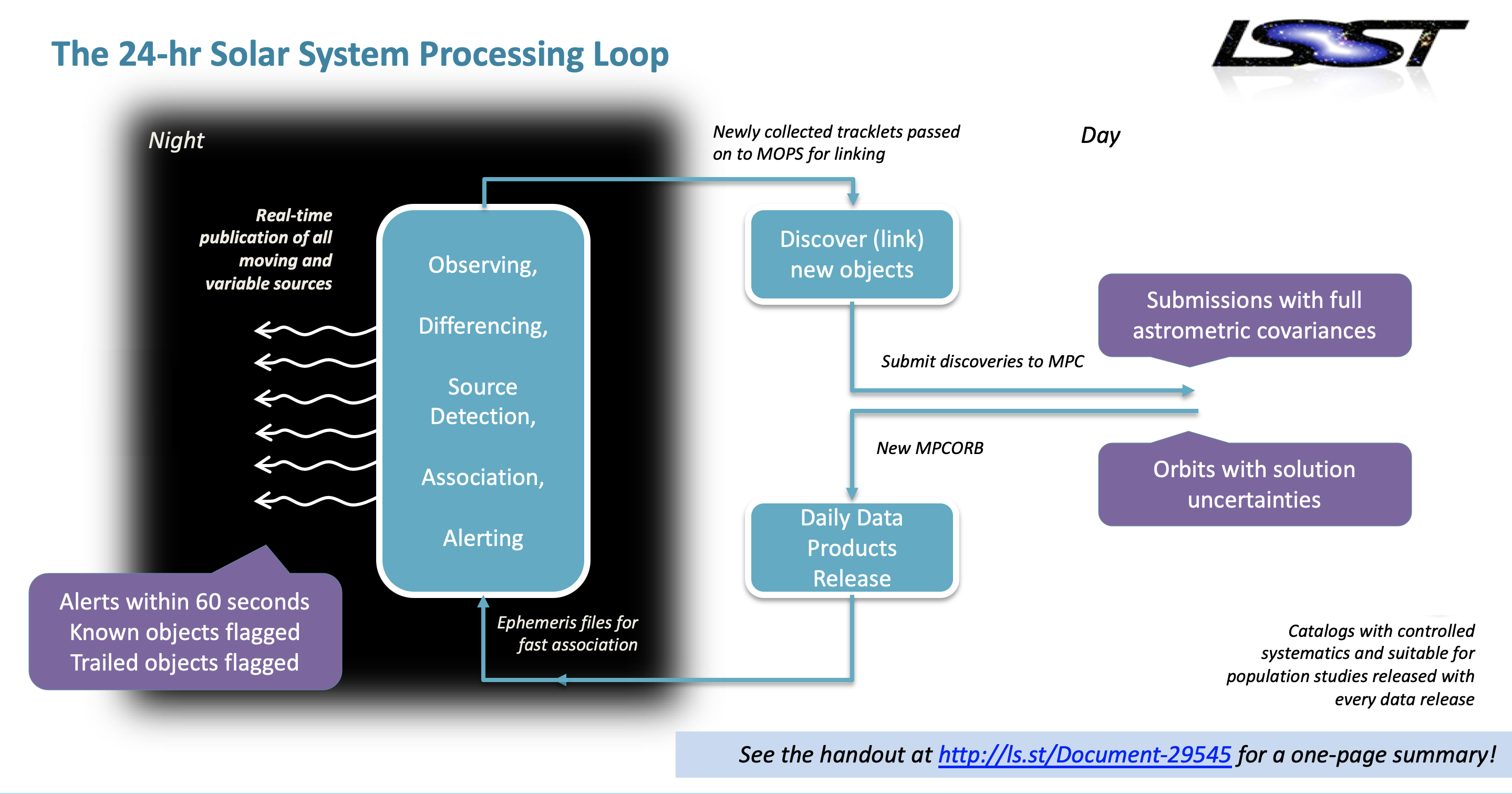
Rubin Observatory Solar System Processing Schematic - Image Credit: Mario Jurić
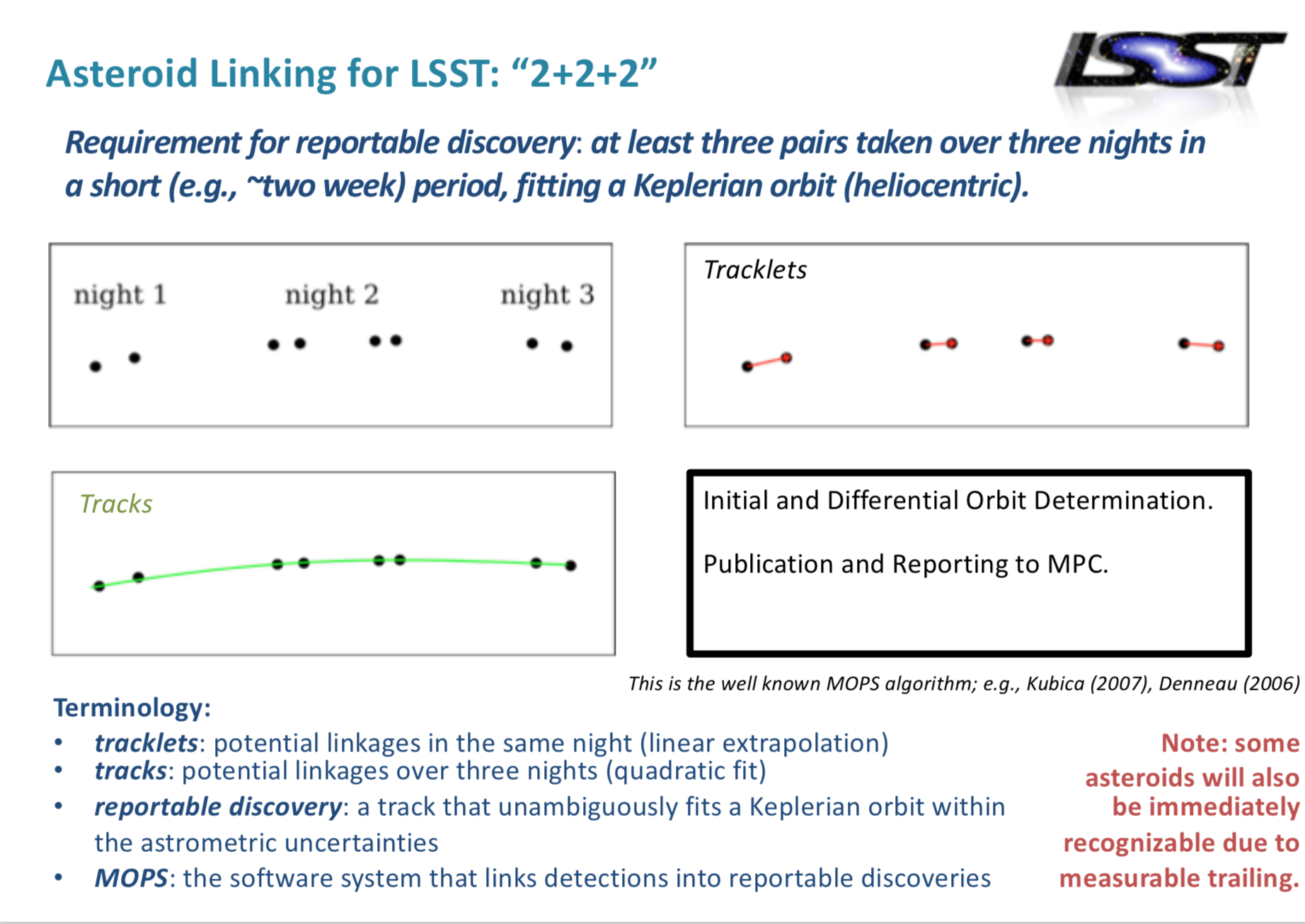
Image Credit: Mario Jurić